タミヤ「ムカデロボット」、なぜセンサー無しで障害物をさける? 機構を再現する“模型”の面白さ
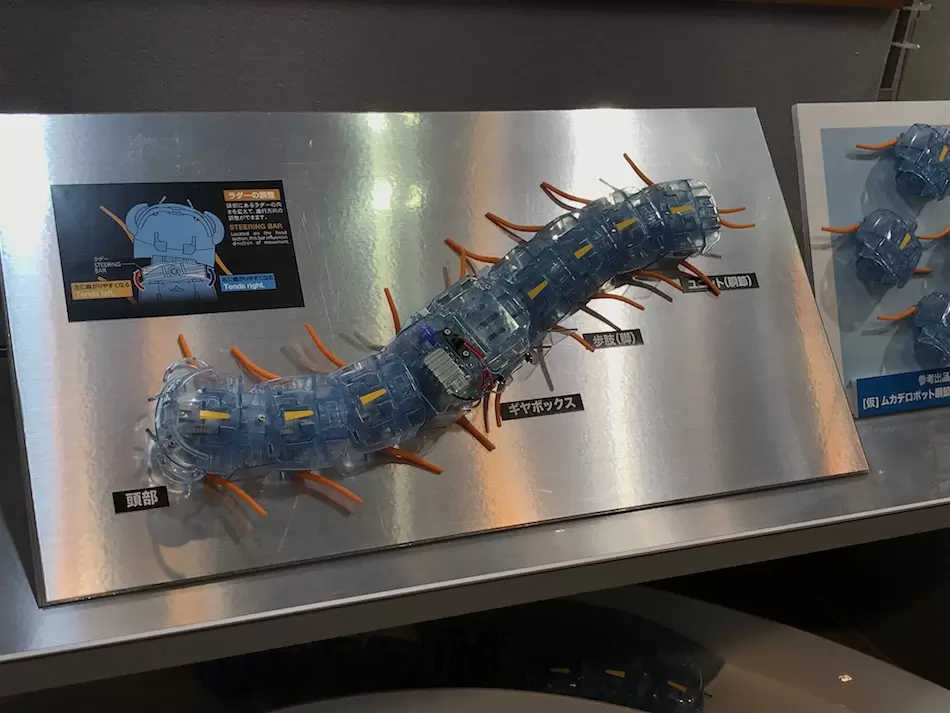
今年も開催された、第57回 静岡ホビーショー(5月10日〜13日)。その会場の片隅で、一風変わったキットが発表された。タミヤの"楽しい工作シリーズ"の新作「ムカデロボット工作セット」がそれである。キットに含まれているのは全長40㎝ほどの、まさにムカデ型のロボット。クリアブルーの胴体からは内部の動力が見え、オレンジ色の脚を回転させて障害物を乗り越えつつ動く姿は、かなり実物のムカデに似た雰囲気が出ている。

i-CentiPotを開発した大須賀教授が研究しているのが、力学的なダイナミクスとその制御に関する仕組みである。現在のロボット研究では、高度なAIや制御装置を搭載した機材も数多く登場しているが、大須賀教授の研究領域はそれとは異なっている。i-CentiPotを見るとわかるように、このムカデ型ロボットには複雑なAIなどは搭載されていない。形こそ大きいが、動力源は普通の工作用モーターと電池。駆動に関しても「樹脂製の脚を回転させることで前進する」という、極めて単純なものだ。地形を把握するためのセンサーなども搭載されていない。


このことから見えてくるのは、生物が自らの動きを制御するときに何に影響されているのかという点だ。単純な構造だけで生物の動きを模倣できるということは、脳や神経を介さなくとも環境によって勝手に最適な動きをする生物が存在するという点につながる。この知能を介さない動きから「制御しない制御」が成立するのではないか。それを実証するために作られたのがi-CentiPodなのだ。
タミヤの「ムカデロボット工作セット」は、この研究のためのロボットをキット化したものである。考えてみれば、模型という存在が現在の「実在するモチーフの縮尺を縮め、そのフォルムを模す趣味」という形に落ち着く前には「機構や構造を模すためのもの」「教育に用いられるもの」という段階があった。最先端の大学研究で使われているロボットがほぼそのままキット化されるという点には、この原初的な模型のあり方を思い起こさせるものがある。